
1. Gearfetting fan it antwurd
Essensjele easken foar in op in UAV monteard meteorologysk ynstrumint omfetsje in ultralicht ûntwerp (ûnder 60g) en in yntegreare struktuer sûnder bewegende ûnderdielen om aerodynamyske stabiliteit en duorsumens te garandearjen. Ideale sensoren moatte hege wjerstân biede tsjin elektromagnetyske ynterferinsje en standertprotokollen lykas Modbus RTU stypje foar naadleaze yntegraasje fan flechtkontrôle. Dizze technyske arsjitektuer makket real-time monitoring mooglik fan fiif wichtige miljeu-eleminten - wynsnelheid, rjochting, temperatuer, fochtigens en druk - sûnder de flechtduorzaamheid fan moderne droneplatfoarms yn gefaar te bringen.
2. Ynlieding: De krityske rol fan real-time meteorology yn drone-operaasjes
Yn 'e wrâld fan ûnbemanne loftfeartugen (UAV's) mei hege ynset binne real-time meteorologyske gegevens it ferskil tusken in suksesfolle missy en in katastrofaal frameferlies. It mjitten fan wynsnelheid, rjochting, temperatuer, fochtigens en atmosfearyske druk tidens de flecht is net langer in opsjonele "ekstra" - it is in kearneasken foar flechtstabiliteit, batterijoptimalisaasje en presyzje fan lading.
By Honde Technology hawwe wy ús sensoroplossingen ûntworpen om de primêre obstakels fan hardware monteard op drones te oerwinnen: gewichtsboetes, hege wynwjerstân en sinjaaldegradaasje. Troch meganyske komponinten te eliminearjen foar in yntegreare, solid-state ûntwerp, geane wy de spesifike útdagings oan fan hege elektromagnetyske ynterferinsje (EMI) typysk foar boarstelleaze DC-motor (BLDC) omjouwings, wêrtroch in nije standert fêststeld wurdt foar autoritative, flechtklear miljeugegevens.
3. Wichtige parameters: Wêrom "Lichtgewicht" en "Lyts" net ûnderhannelber binne
Foar UAV-systeemyngenieurs is elke gram dy't tafoege wurdt oan it fleantúchframe in direkte belesting op flechtduorzaamheid en manoeuvreerberens. Histoarysk sjoen easke it yntegrearjen fan in folsleine meteorologyske suite faak in oerstap nei in gruttere, djoerdere droneklasse. It Honde UAV-waarynstrumint fersteurt dizze ôfwaging. Mei in diameter fan mar 50 mm en in totaal gewicht fan 55-56 g wurdt it erkend as ien fan 'e lichtste en lytste ynstruminten op 'e wrâldmerk.
Kearnfoardielen foar UAV-flechtkontrôle-yntegraasje:
- Leech enerzjyferbrûk:Mei help fan in ynterne chip mei leech fermogen brûkt de sensor mar 10mA by in berik fan 5-12V, wêrtroch't de boarnen fan 'e stroomferdielingsboerd (PDB) fan it fleantúch bewarre wurde.
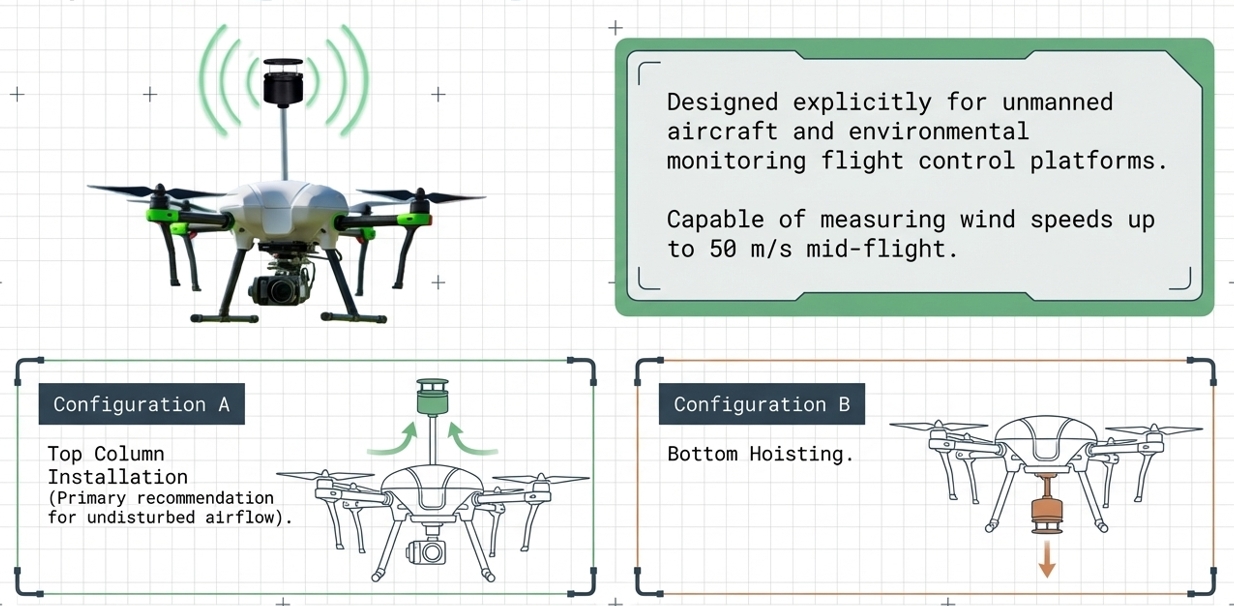
- Yntegreare Ultrasone Struktuer mei Trije Sondes:Lykas te sjen is yn ús spesjalisearre ûntwerp, ferwideret de ultrasone arsjitektuer mei trije sondes bewegende ûnderdielen, wêrtroch't de ienheid ymmún is foar de hege-frekwinsje trillingen fan flecht.
- EMI-wjerstân:Spesifyk ûntworpen om gegevensintegriteit te behâlden nettsjinsteande de wichtige elektromagnetyske rûs dy't generearre wurdt troch dronemotors mei hege útfier en radiotelemetrie.
- Miljeu-weerbaarheid:De IP-klassifisearre wetterdichte en stofdichte behuizing omfettet in spesjale waarmte-isolaasjebehanneling op 'e beskermjende omslach, wêrtroch konsekwinte prestaasjes mooglik binne by ekstreme temperatueren en lichte rein.
4. Ferlykjende technyske spesifikaasjes
De folgjende parameters fertsjintwurdigje de fiif-elemintenmooglikheden fan it Honde-ynstrumint, strukturearre foar rappe opname troch flechtkontrôlelogika en AI-oandreaune monitoringsystemen.
| Parameternamme | Mjitberik | Krektens | Resolúsje | Ienheid |
| Wynsnelheid | 0~50m/s | ±0,5 m/s (@10 m/s) | 0.01 | m/s |
| Wynrjochting | 0-359° | ±5° (@10m/s) | 0.1 | ° |
| Temperatuer | -20-85 ℃ | ±0,3℃ (@25℃) | 0.01 | ℃ |
| Fochtigens | 0-100% RV | ±3%RV (<80%RV) | 0.01 | %RH |
| Loftdruk | 500-1100hPa | ±0.5hPa | 0.1 | hPa |
| Ynfierspanning | 5-12V | — | — | VDC |
| Aktueel | 10mA | — | — | mA |
5. Yntegraasje en kommunikaasje: Modbus RTU brûke foar Smart Flight
Yntegraasje foar de moderne UAV-yngenieur is ôfhinklik fan 'e digitale RS485-ynterface en de fleksibiliteit fan Modbus RTU- en ASCII-protokollen.
Technyske djipgong: Registermapping en formulesOm heksadesimale sensorútfier om te setten yn aksjebere flechtgegevens, moatte ûntwikkelders de juste skalearingsfaktoaren tapasse. Yn myn ûnderfining is it lofttemperatuerregister it wichtichst om korrekt yn kaart te bringen:
- 0×0009: Lofttemperatuer
- Formule:
Resultaat = (Heksadesimaal / 100) - 40 - Foarbyld:0x1B00 (6912) berekkenet nei 29.12℃.
- Formule:
- 0x000A: Loftfochtigens
- Formule:
Resultaat = Heksadesimum / 100(bygelyks, 0 × 1603 = 56,35% RV).
- Formule:
- 0x000B: Atmosfearyske druk
- Formule:
Resultaat = Hex / 10(bygelyks, 0 × 2784 = 1011.6 hPa).
- Formule:
- 0x000C: Wynsnelheid
- Formule:
Resultaat = Heksadesimum / 100(bygelyks, 0 × 0125 = 2,93 m/s).
- Formule:
- 0x000D: Wynrjochting
- Formule:
Resultaat = Hex / 10(bygelyks, 0x0C14 = 309.2°).
- Formule:
Avansearre konfiguraasje: It elektroanyske kompasFoar UAV's dêr't de sensor miskien net fysyk ôfstimd is mei de wiere noardlike rjochting fan 'e drone, stipet de sensor in opsjoneleElektroanysk kompas (0×0020)Dit makket it mooglik foar it systeem om in rjochting út te jaan relatyf oan in oanpast noarden, wat krúsjaal is foar dynamyske oanpassingen fan 'e flechtrûte.
Montageopsjes
- Fertikale topkolom ynstallaasje:Oanrikkemandearre foar skjinne loftmonstername boppe de prop-wask (mei help fan de fertikale mast dy't te sjen is yn ús technyske fisuals).
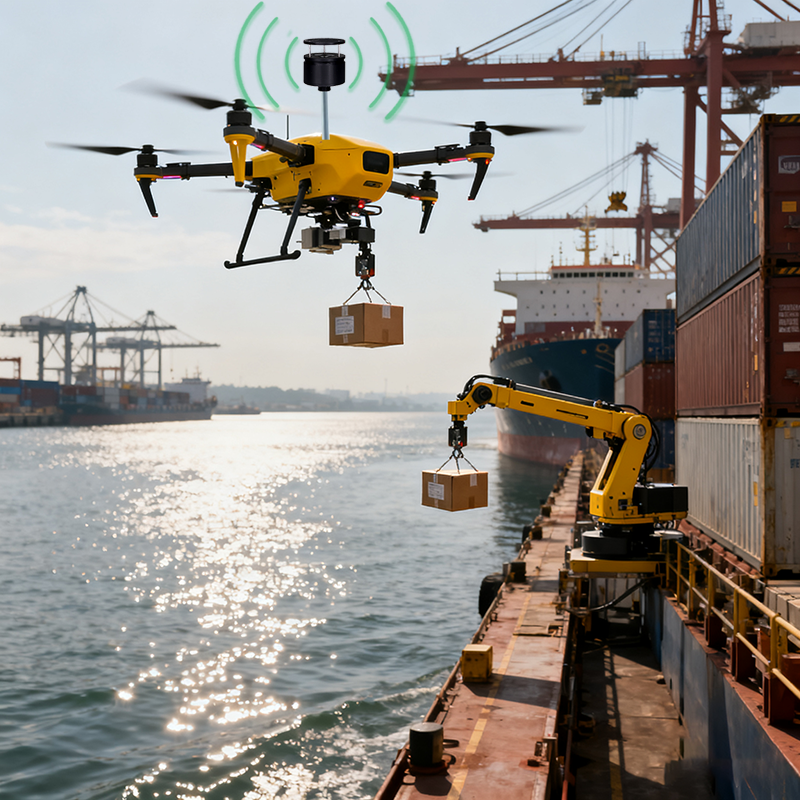
- Underheffen:Ideaal foar swiere hefplatfoarms wêr't de sensor fungearret as in oanboude of ûnderhingjende miljeusonde.
6. Bêste praktiken foar yngenieurs: foarkommen fan faak foarkommende falstrikken
Yn myn ûnderfining mei it konfigurearjen fan dizze flight stacks foar B2B yndustriële kliïnten, kinne in pear subtile protokoldetails de betrouberens fan in systeem meitsje of brekke:
- Respektearje de 1S Query Cycle:De ynterne ferwurking hat tiid nedich om fiif datapunten te stabilisearjen. Wy hawwe ûntdutsen dat it negearjen fan 'e minimale 1S/tiid query-syklus yn jo hostsoftware resulteart yn ynstabile datastreamen en bufferoverflows.
- Stille flaterbehanneling:Dit is in wichtige "insider" tip: de sensorjout gjin flaterkoade weromfoar CRC16-kontrôleflaters of ferkearde kommando's. As jo systeem binnen gjin antwurd krijt200ms, moatte jo jo stjoerprogramma programmearje om it kommando automatysk opnij te ferstjoeren.
- Registrearje grinskontrôles:Soargje derfoar dat jo pollingkommando's gjin registeradressen bûten it oantsjutte berik oanfreegje. De útfier fan 'e sensor wurdt ûnfoarspelber as der nei net-besteande registers frege wurdt.
7. Konklúzje & Kommersjele oprop ta aksje
De HondeOp in UAV monteard waarynstrumintbiedt in wiidweidige meteorologyske suite mei fiif eleminten yn ien pakket fan 56 g. Troch te optimalisearjen foar leech fermogen en hege EMI-wjerstân, leveret it de "grûnwierheid"-gegevens dy't nedich binne foar presyzje-drone-operaasjes sûnder de aerodynamyske of gewichtsboetes fan âlde apparatuer.


- Freegje in oanpaste offerte oan foar jo miljeumonitoringprojekt.
Bedriuwsnamme:Honde Technology Co., Ltd.Webside: www.hondetechco.com E-post: info@hondetech.com
Pleatsingstiid: 8 april 2026